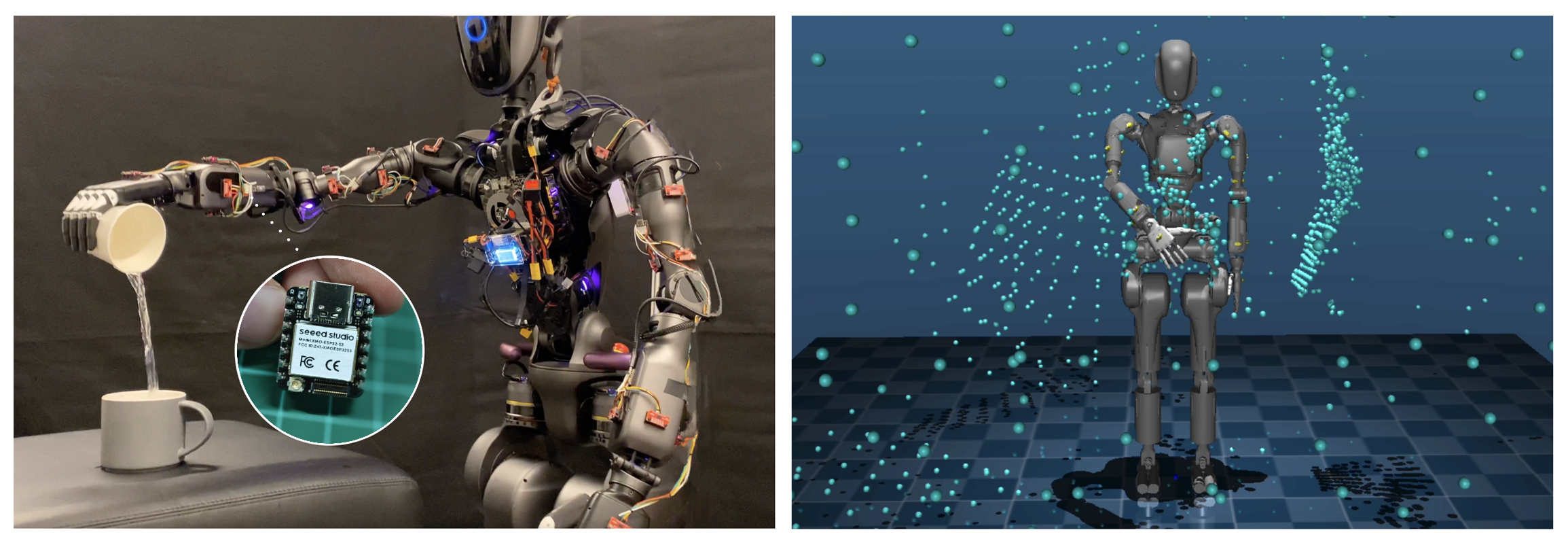
“Kullanıcıların giyilebilir sensörlerle kolayca takıp kullanabileceği ve robotların çeşitli görevlerde algılarını artırabileceği bir geleceği hayal edebiliriz. XIAO ESP32 serisi, giyilebilir sensör sistemini kolayca modüler hale getiriyor. ARMOR’da güçlü hesaplama yetenekleri ve küçük form faktörü nedeniyle özellikle XIAO ESP32S3’ü benimsedik.”