
Bu hafta size 399 USD’ye kullanıma hazır yeni 3D (x, y, z) sistemini sunuyoruz: Marvelmind İç Mekan Navigasyon Sistemi Başlangıç Seti HW (915/868MHz) Robot ve insan konumlandırması için yüksek hassasiyetli (±2cm) iç mekan takip sistemi.
Marvelmind İç Mekan Navigasyon Sistemi, 2D/3D takip için raflarda bulunan bir iç mekan navigasyon GPS’idir. Sistem, mobil işaretçiden konum bilgilerini almak için sabit ultrasonik teknolojiye dayanmaktadır. İstasyon işaretçileri, mobil işaretçiden gelen ultrasonik sinyali almak için donatılmıştır.
Set şunları içerir:
- Standart 50mm antenlere sahip 4 sabit işaretçi
- IMU’suz 1 mobil işaretçi
- 250 işaretçiye kadar destekleyen 1 modem

Özellikler
- Otonom robotlar, araçlar (AVG) ve dronlar için yüksek hassasiyetli (±2cm) iç mekan takip sistemi.
- Mesafeyi ölçmek için ultrasonik, oF (Zaman Uçuşu) ve trilaterasyon teknolojisi.
- Duvarda veya tavanda kurulu sabit işaretçiler ve insan vücuduna veya robotlara kurulu mobil işaretçi.
- İşaretçilerin kapsama yarıçapı 50 metreye kadar.
- 4 sabit işaretçi, 1 mobil işaretçi ve 1 modem. Modem, 250 işaretçiye kadar destekleyebilir.
- Ayrıca, mobil işaretçinin takılı olduğu diğer nesneleri takip etmek için de kullanılır, örneğin sanal gerçeklik (VR) sistemleri, inşaat işçileri için kasklar.
Sistemin Temelleri
İç Mekan Navigasyon Sistemi (“GPS”) (±2cm hassasiyet)
Marvelmind İç Mekan Navigasyon Sistemi, otonom araçlar ve robotlar için yüksek hassasiyetli iç mekan koordinatları sağlar, aşağıdaki resimde gösterildiği gibi.
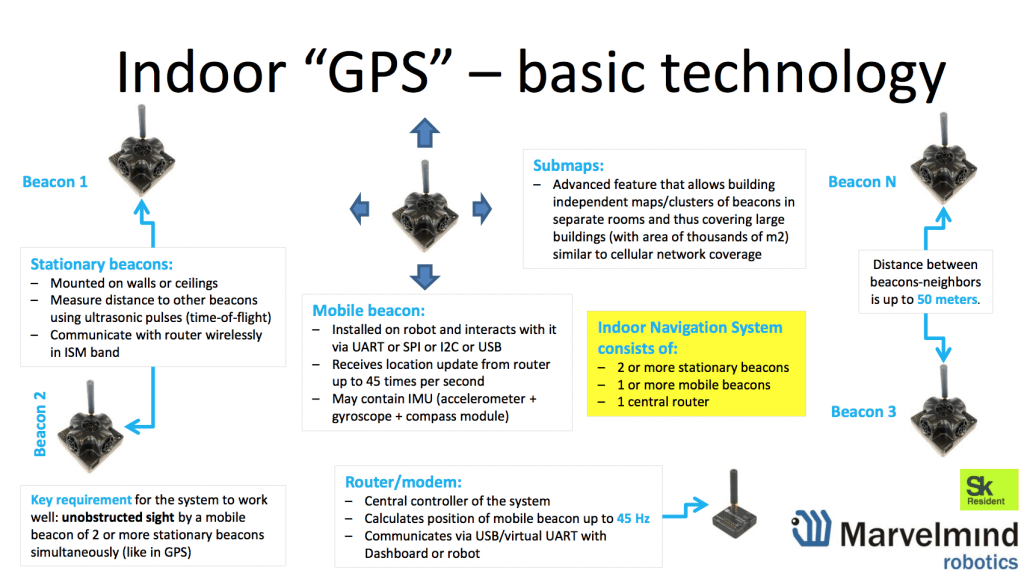
Sistemin düzgün çalışması için ana gereksinimler:
- 3D (X, Y, Z) takibi için – Mobil işaretçinin üç veya daha fazla sabit işaretçiyi aynı anda engellenmeden görmesi
- 2D (X, Y) takibi için – Mobil işaretçinin iki veya daha fazla sabit işaretçiyi aynı anda engellenmeden görmesi
- En yakın 2 veya 3 işaretçiye mesafe – 30 metreden fazla olmamalıdır (önerilir). İdeal koşullarda – 50 metreye kadar
Demos
Simüle edilmiş bir ofis/fabrika ortamında hareket eden tamamen otonom küçük bir teslimat robotu
- Mobil işaretçi robota takılmıştır
- Sabit işaretçiler duvarlara takılmıştır
- Mavi noktalar – Marvelmind İç Mekan Navigasyon Sistemi tarafından ölçülen robotun (mobil işaretçi) konumu
- Sarı noktalar – Robotun kendi inersiyal/odometri sisteminden elde edilen konumu
- Büyük yeşil noktalar – Duvarlara takılmış sabit işaretçiler
Robot ve Marvelmind İç Mekan Navigasyon Sistemi, masaların ve sandalyelerin altındaki işaretçilerin ultrasonik sinyal gölgelerini oldukça iyi bir şekilde yönetmektedir. Bu, robotun gerçek yaşam ortamında görevlerini oldukça iyi bir şekilde yerine getirmesini sağlar.
Sabit işaretçiler arasındaki mesafe 50 metreye kadar olabilir.
Marvelmind “GPS” kullanarak tamamen otonom olarak hareket eden robot
Tamamen otonom bir robot, aşağıdakilere dayanarak kendi kendine hareket etmektedir:
- Marvelmind İç Mekan “GPS”
- Taşınabilir odometri ve inersiyal üniteler
Robotlar, ziyaret edilecek ana noktaların koordinatlarını kullanıcıdan alır (sağdaki masa) ve ardından sürekli olarak konumunu yola göre düzelterek bir yol oluşturur ve takip eder. Koordinatlar, harita üzerinde sadece tıklayarak Dashboard’da otomatik olarak oluşturulur.
İşaretçiler arasındaki mesafe 36 metreye kadar olabilir.
Her 20-40 metrede bir daha fazla işaretçi kurarak tam kampüsü hassas “GPS” ile kapsamak mümkündür.
İndirilenler
- Marvelmind İç Mekan Navigasyon Sistemi Kullanım Kılavuzu
- Kurulum Kılavuzu
- Otonom dron ayar kılavuzu
- PixHawk ve Marvelmind Entegrasyon Kılavuzu
Raspberry 2 ve Raspberry 3 üzerinde ROS desteği:
Marvelmind ROS paketi – GitHub bağlantısı.
Marvelmind ROS paketi v1.0.8 uyumluluğu ve ana değişiklikler:
- Hem milimetre hem de santimetre (eskimiş) veri formatlarını destekler
- Veri akışında kirpi adresini destekler. Modemden birden fazla kirpinin konumlarını alabilir
- Sabit işaretçilerin konumlarını alma desteği vardır
- Desteklenen ROS sürümleri:
- Ubuntu 16.04 için Kinetic
- Ubuntu 14.04 için Indigo
- Ubuntu 12.04 için Hydro