
Hajimete! DL itme çılgınlığı başlasın!
Orijinal makale Dmitry Maslov tarafından yayınlandı Hackster.io
Robot-sumo veya pepe-sumo, iki robotun bir dairenin dışına itmeye çalıştığı bir spordur (sumo sporuna benzer bir şekilde). Bu yarışmada kullanılan robotlara sumobot denir.
Vikipedi’den, özgür ansiklopedi
Robot sumo, klasik ve en popüler robot yarışmalarından biridir. Rakibi ringin dışına itme görevini başarmak için kullanılan çok çeşitli yapılar vardır.
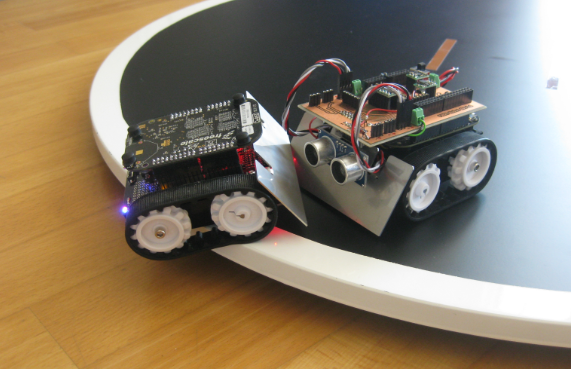
Birçok daha basit robot, rakibi bulmak için ultrasonik veya kızılötesi sensörlere dayanır ve ardından saldırgan bir eylemde bulunur. Bu makalede, sumo botunun bir varyasyonunu yapmak için M.A.R.K. mobil platformunu kullanacağız. M.A.R.K. (metin içinde MARK olarak adlandıracağım) Robot Yapım Kiti anlamına gelir ve TinkerGen eğitim tarafından geliştirilen bir eğitim robot platformudur. MARK’ın geliştirilmesine katılıyorum ve şu anda bir Kickstarter kampanyası başlatmaya hazırlanıyoruz. Eşlik eden kurslarda öğrenciler, MARK ile çeşitli görevleri tamamlamayı öğrenecekler, yani kendi kendine sürüş, devriye, teslimat hizmeti vb. Lise M.A.R.K. kursu için kurs materyalleri yazarken, hem STEM öğretmenlerine hem de öğrencilere aşina olan ve aynı zamanda benzersiz bir dokunuşa sahip bir zorluk eklemek istedim. Bu nedenle, iki MARK robotunun rakibi tespit etmek için DL modellerini kullanması gereken bir robot sumo yarışması tasarlamaya karar verdim. Bu şekilde, hangi robotun kazanma olasılığının daha yüksek olduğunu belirleyen iki faktör vardır:
- eğitilmiş modelin doğruluğu
- tespit onaylandıktan sonraki saldırgan eylem algoritması
AI on the Edge için Keras tabanlı aXeleRate kullanacağız ve model eğitimi hattı, daha önce sahip olduğumuz kişi tespit cihazı ile çok benzer. Bu durumda tek sorun, uygun bir veri setinin eksikliği – kendi özel robotunuzla veya MARK ile sumo yarışması yapmak istiyorsanız, internette indirilebilecek hazır veri setleri yok. Sıfırdan nesne tespiti veri seti oluşturmak zahmetli bir iştir, genellikle bir sınıf için kabul edilebilir sonuçlar elde etmek için en az 1000 resim gereklidir. Neyse ki, MARK ile bir kısayol kullanabiliriz. MARK şasisi çoğunlukla siyahtır. Bu nedenle, görüntüdeki en büyük siyah lekeleri tespit edecek ve etrafında bir sınırlayıcı kutu çizecek basit bir OpenCV betiği yazabiliriz.
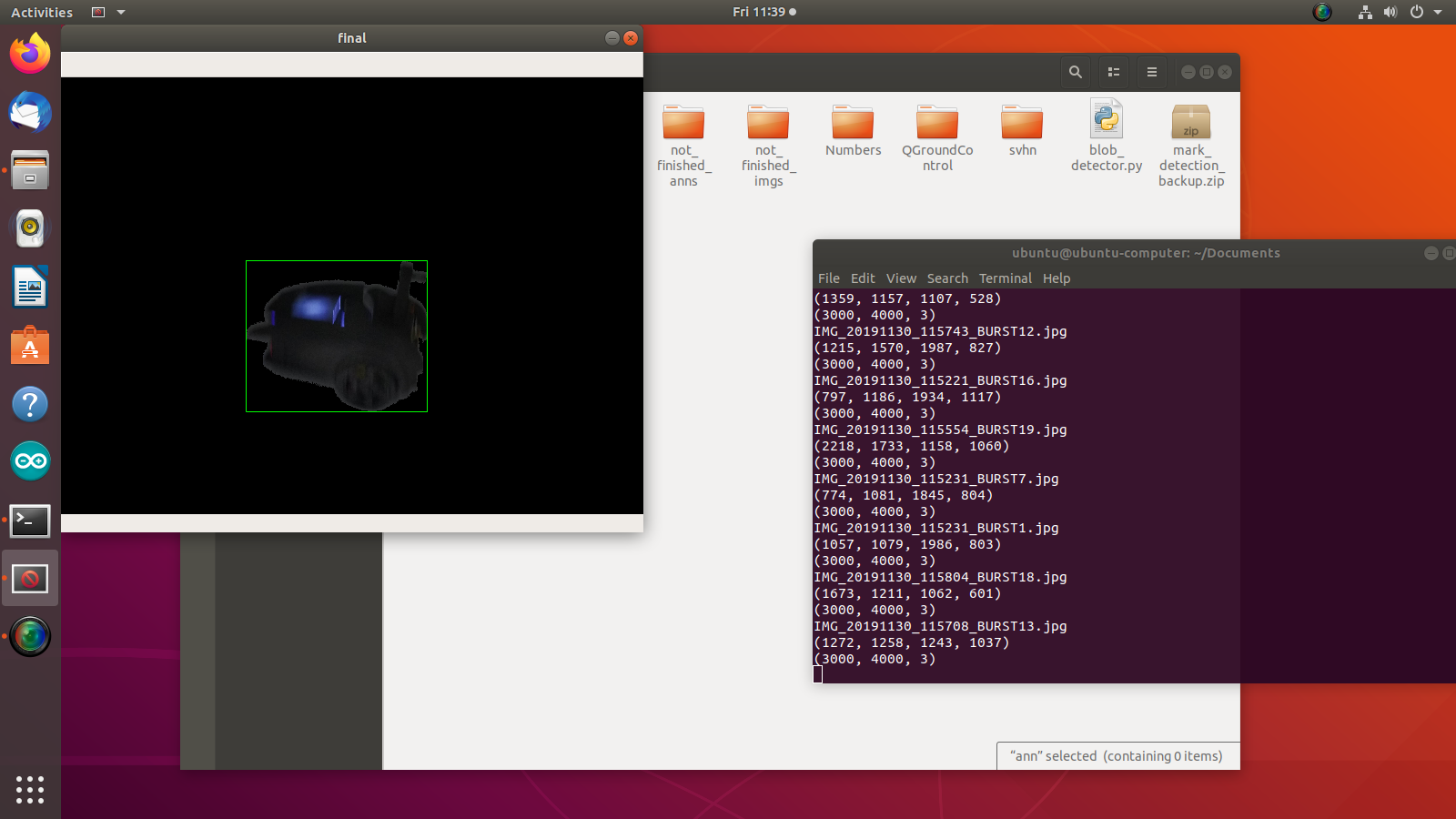
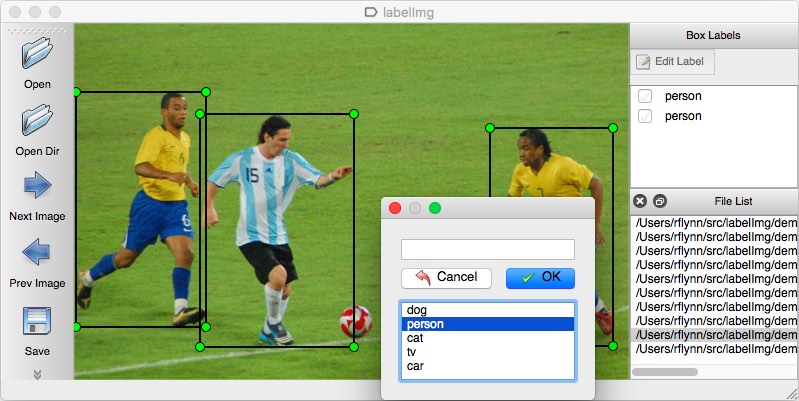
Daha sonra, robotun akıllı telefon kamerasıyla çektiğimiz tüm görüntüleri en az 4-5 farklı ortamda işleyeceğiz. OpenCV betiğinden aldığımız etiketleme dosyalarında bazı hatalar vardır (özellikle ortam karanlıksa ve çok fazla gölge varsa) ve bunları eğitimde kullanmadan önce labelImg etiketleme aracıyla doğrulamamız ve düzeltmemiz gerekecek.
Veri seti hazır olduktan sonra, modeli eğitmek için bu Colab defterini kullanalım. Ayrıca, öğrencilerin modelin normal performansının ne olması gerektiğini anlamaları için kursla birlikte dahil edilen temel eğitilmiş modeli paylaşıyorum. MARK için tam Micropython kodu bu makalenin kod bölümünde bulunmaktadır. Nihai sonuç videolarına göz atın – biri makalenin başında ve diğeri aşağıda. Bu bir öğrenci yarışması olduğu için, hem model hem de robot kodu rakipler üzerinde avantaj sağlamak için geliştirilebilir (geliştirilmelidir).
Benim tarafımdan daha fazla makale ve MARK Kickstarter kampanyasıyla ilgili güncellemeler için takipte kalın.
Grove Zero serisi, Codecraft ve yapımcılar ile STEM eğitmenleri için diğer donanımlar hakkında daha fazla bilgi için web sitemizi ziyaret edin, https://tinkergen.com/.