
Kendi robot arabanızı yapmayı ve robot arabanızın hareket ettiğini görmeyi hiç ister miydiniz? Bu kılavuzda, robot arabanızı nasıl DIY yapacağınızı ve daha fazla özellik kazandırmak için aksesuarları nasıl seçeceğinizi adım adım göstereceğiz. Daha önce böyle bir projeyi denemediyseniz bile, bu kılavuzu kullanarak pratik becerilerinizi geliştirebilir ve bazı temel kodlarla tanışabilirsiniz.
-2.gif)
Şasi İnşası
Adım 1: Malzeme hazırlığı
Arabanızı monte etmek için aşağıdaki malzemelere ihtiyacınız olacak. Bileşenin model numarasını nasıl seçeceğinizden emin değilseniz, bunları bir araya nasıl monte edeceğinizi öğrenmek için lütfen bu talimatları okuyun.
- İki motor
Motor seçimi açısından, JGA-25 serisi motorları seçebilirsiniz. JGA-25 serisi motorların encoder versiyonları vardır, bu da arabanın hızını ölçebilir. Aynı zamanda TT motoru da seçebilirsiniz. Performansı JGA-25 serisi motordan biraz daha zayıf, ancak daha uygun fiyatlıdır.
- İki tekerlek
Seçtiğimiz motora bağlı olarak, ona uygun tekerleği seçmemiz gerekecek. TT motoru kullanıyorsanız, TT DC MOTOR TEKERLEĞİni seçmelisiniz. Bu ürün sadece kaliteli değil, aynı zamanda uygun fiyatlıdır, bu da onu çok iyi bir seçim haline getirir. Diğer bir tekerlek olan 6514A serbest tekerlek, TT motoru ve N20 motoru ile Couplings Kit aksesuarını değiştirerek eşleştirilebilir. Mağazamız, JGA-25 ile mükemmel uyum sağlayan iki revolver, iki sağ tekerlek, bir altıgen alet ve dört bağlantı ile birlikte 97mm Mecanum Tekerlek (4 paket) gibi daha iyi ürünler sunmaktadır. Bunlar arabanızı daha havalı ve ilginç hale getirecektir.
- MCU kontrol kartı
Arabanın kontrol merkezi olarak geleneksel mikrodenetleyici geliştirme kartını seçebiliriz, örneğin Arduino, Seeeduino vb.
Ayrıca, Raspberry Pi 4 ve Nvidia Jetson Nano gibi en popüler AI geliştirme kartlarından bazılarını da seçebilirsiniz.
Bu anakartlar arabanıza AI yetenekleri kazandıracaktır.
- Motor sürücü kartı ve Grove sensörü
- Mini araba taban kartları
Seçtiğiniz MCU kontrol paneline göre farklı türde taban kartları seçin. Raspberry Pi Akrilik taban kartları (yakında), Jetson nano Akrilik taban kartları (yakında) ve Seeeduino Akrilik taban kartları (yakında) sunuyoruz.
- Pil yuvası ve 4x 1.5 volt pil (yakında)
- Diğerleri
JGA25-371 Motor Braketi (https://www.seeedstudio.com.tr/JGA25-371-Motor-Bracket-p-4118.html), montaj sürecinde motoru güvence altına almanıza yardımcı olabilir.
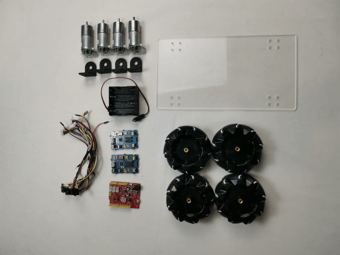
Bu kılavuzda, özelleştirilmiş bir akrilik taban kartı, dört jga-25 motor ve uyumlu jga25-371 motor braketi, 97mm Mecanum tekerlek (4 paket), Seeduino geliştirme kartı ve iki Grove I2C Motor Sürücü kartı örnekleri seçerek küçük bir arabanın nasıl kolayca monte edileceğini göstereceğim.
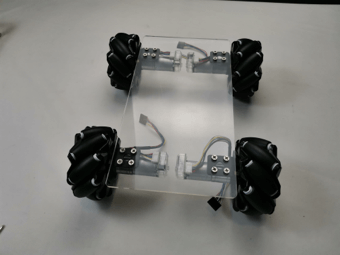
Adım 2: Tekerlek ve motoru gövdeye monte etme
Her tekerleği ilgili motora vidalayın ve motoru akrilik taban kartına şu şekilde sabitleyin:
- Motoru taban kartının her iki tarafına sabitleyin. İki tarafın simetrisine dikkat etmek gereklidir.
- Taban kartına sabitledikten sonra, tekerlekleri döndürerek tekerleklerin normal bir şekilde hareket ettiğinden emin olun.
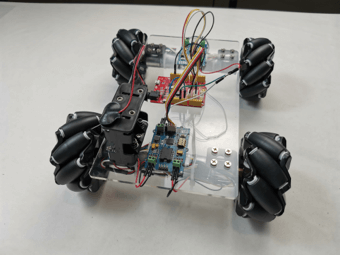
Adım 3: Geliştirme kartı ve motor sürücü kartını güvence altına alma
- Geliştirme kartını, motor sürücü kartını ve pil kutusunu taban kartına sabitleyin.
- Sabitleme sürecinde, montaj pozisyonunun arabayı hareket ettirmesini etkilememesi gerektiğine dikkat edilmelidir.
Bağlantı
Adım 1: Pil kutusunu bağlayın
Pil kutusunun iki bağlantı kablosu vardır, bir ucu pozitif (kırmızı) ve bir ucu negatif (siyah). Bağlantı şu şekildedir:
- Pozitif hattı geliştirme kartının Vin pinine bağlayın.
- Negatif kabloyu geliştirme kartının Gnd pinine bağlayın.
Adım 2: Motor sürücü devresini bağlayın:
- Motor sürücüsünün pozitif pinini geliştirme kartının Vin pinine bağlayın.
- Motor sürücüsündeki negatif kabloyu geliştirme kartının Gnd pinine bağlayın.
- Pinsleri tanımlamakta zorluk yaşıyorsanız, lütfen belirli model için çevrimiçi kılavuza başvurun.
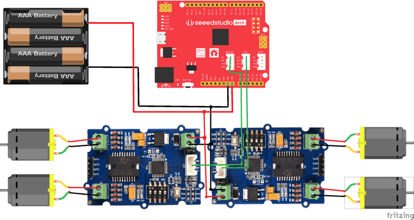
Adım 3: Motoru motor sürücü kartına bağlayın:
- Motor sürücü kartının pozitif ve negatif kutuplarını iki motorun pozitif ve negatif kutuplarına bağlayın.
Robot Arabanın Programlanması
Bilgisayarı bağlayın ve programlayın
Geliştirme kartını bilgisayara bağlayın ve ilgili Arduino IDE’yi açın. Arabanın hareketini Arduino IDE üzerinden programlayabilirsiniz. Aşağıda gösterildiği gibi, arabanın düz ve dönüşünü basitçe göstereceğim.
Daha fazlasını deneyin ve işlevselliği genişletin!
Arabanızın işlevselliğini çeşitli sensörler ve modüller ekleyerek zenginleştirebilirsiniz.
Öneri 1: Bluetooth aracı
Araca Grove – Serial Bluetooth ekleyin ve telefonunuza Bluetooth Serial Assistant uygulamasını indirerek aracı telefonunuzla kontrol edin.
Öneri 2: Radar mini aracı
Bu oldukça zorlu bir proje olacaktır. Arabanın kontrol merkezi olarak NVIDIA Jetson Nano kullanabilir ve otonom konumlandırma navigasyonu için bir radar modülü ekleyebilirsiniz. Ayrıca, Raspberry Pi Kamerası arabanın gözleri olabilir ve görüntü tanıma işlevine sahip olabilir.
Daha fazla beklenmedik fikir sizi gerçekleştirilmek üzere bekliyor. Arabanızı monte ederseniz, bunu forumumuzda paylaşmaktan çekinmeyin.
Alışveriş Rehberi: Robot arabam için tüm parçaları nereden alabilirim?
Tüm parçaları bir araya getirmek için lütfen Çevrimiçi mağazamızdaki Robot Araba Kılavuzumuzu kontrol edin! Ayrıca, robot arabanızı çok daha güçlü hale getirmek için RPLIDAR A1M8 ve RPLIDAR A3M1 için global ücretsiz kargo sunuyoruz.