
ROS (Robot İşletim Sistemi), robot yazılım geliştiricilerine bir dizi araç, kütüphane ve konvansiyon içeren esnek bir çerçeve sağlamayı amaçlamaktadır. Aynı zamanda, ROS, heterojen bilgisayar kümeleri için işletim sistemleri gibi ara yazılımlar da sağlayabilir.

Robot geliştirme sürecinin vazgeçilmez bir parçası olarak, SLAMTEC’in otonom konumlandırma navigasyon programı, en başından beri ROS ekosisteminin inşasına odaklanmıştır. Daha önce, SLAMTEC, ROS ve RPLIDAR kombinasyonunu gerçekleştirmiştir. Daha fazla bilgi için buradan kontrol edebilirsiniz: RPLIDAR VE ROS PROGRAMLAMA – ROBOT YAPMAK İÇİN EN İYİ YOL
Orijinal SLAMWARE her zaman nispeten bağımsız bir sistem olmuştur. Şimdi, ROS’u daha iyi kucaklamak için ROS sürücüsünü yayınladık. Destekleyici ROS sürücüsü ile birleştirildiğinde, üretilen harita ve konumlandırma verileri ROS ortamına sorunsuz bir şekilde entegre edilebilir.
Bu makalede, SLAMTEC Mapper’ı ROS ile birleştirerek haritalar ve konumlandırma verileri elde etmeyi ve bunları robot geliştirme ve uygulama için ROS’un diğer bileşenlerinde nasıl kullanacağınızı öğreteceğiz.

Bu eğitim dört adıma ayrılmıştır:
1. Çevresel ayar hazırlığı
2. Bir ROS çalışma alanı oluşturma
3. SLAMTEC Mapper’ı başlatma
4. Çalıştırma
Yukarıdaki adımları takip ederek SLAMTEC Mapper’ı ROS üzerinde çalıştıracağız (ROS ile tamamen uyumlu).
1. Çevresel ayar hazırlığı
Geliştirme ortamı:
Ubuntu 16.04 işletim sistemi temelinde ve ROS yazılım paketi ile donatılmıştır.
Donanım gereksinimleri:
ROS SDK’sını kullanmak için, uygun IP adresini etkinleştirmek ve yapılandırmak için bir SLAMTEC Mapper cihazına veya SLAMWARE navigasyon ve konumlandırma sistemine dayalı bir mobil robota ihtiyacınız vardır. slamware_ros_sdk_server_node düğümü başlatıldıktan sonra robota bağlanmaya çalışacaktır.
SDK’yı İndir & Kur:
Ön adımlar hazır olduğunda, lütfen platformunuz için ROS SDK’sını indirin ve resmi web sitesinin [İndirme ve Destek] sayfasında yerel olarak çıkarın.
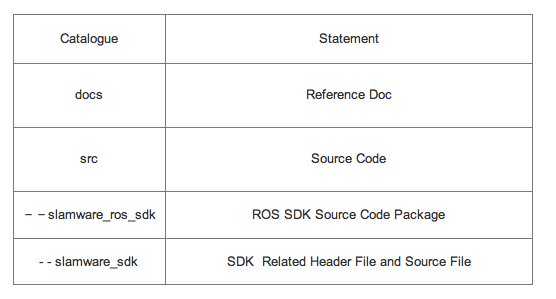
İndirdikten ve kurduktan sonra, Slamware ROS SDK’sı geliştirme sürecinde kullanabileceğiniz kaynaklar ve kodlar içerir. Dizin yapısı aşağıdaki gibi düzenlenmiştir:
2. ROS çalışma alanı oluşturma
Bir ROS çalışma alanı oluşturma:
Kaynak src’yi boş bir çalışma dizinine koyun, örneğin: catkin_ws, catkin aracını kullanarak çalışma alanını başlatın.

Derleme

Çalışma alanı sistem ortamını yapılandırma:

Eğer yukarıdaki Source komutunu her seferinde girmek istemiyorsanız, komutu .bashrc dosyasına yazın, böylece terminali her başlattığınızda otomatik olarak kaynaklanır.

ROS_PACKAGE_PATH ortam değişkenine bakarak çalışma alanınızın düzgün bir şekilde dahil edilip edilmediğini kontrol edin.

3. SLAMTEC Mapper’ı çalıştırma
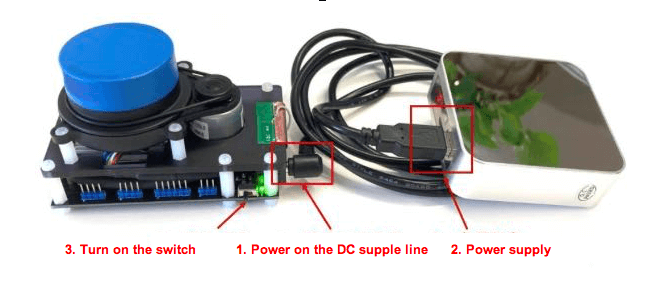
SLAMTEC Mapper M1M1’i örnek alalım. Kurulum adımları aşağıdaki gibidir:
4. Çalıştırma
SLAMTEC Mapper açıldıktan sonra, Linux altında SLAMWARE-XXXX Wifi’ye bağlanın ve başlatma düğümüne bağlanın.
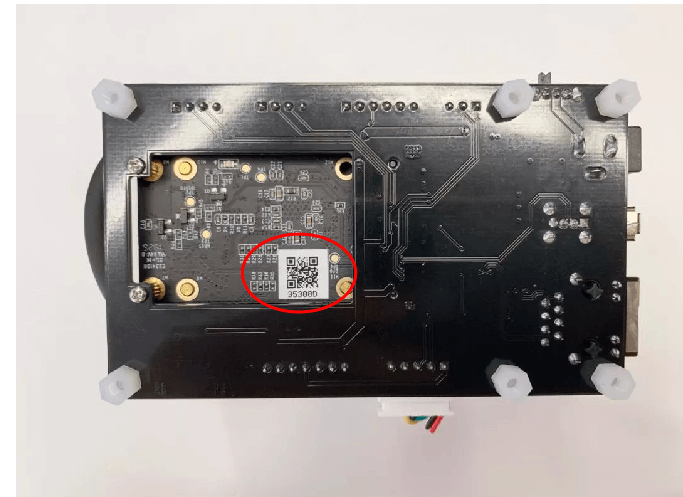
>>> Eğer SLAMWARE – XXXX cihaz numarasını bulamazsanız, lütfen bir süre bekleyin veya yeniden bağlanmayı deneyin.
Düğümü başlat:
Eğer mobil robot AP modundaysa, robot WIFI’ye bağlanın ve düğümü başlatın.

Eğer her şey normalse, RViz arayüzü üzerinden normal ekranı görüntüleyebilirsiniz.
RViz üzerinden görüntüleme:

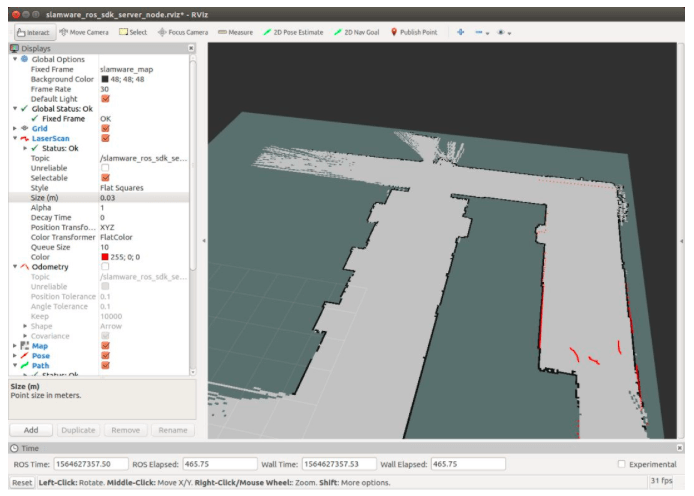
Son olarak, SLAMTEC Mapper’ın RViz’de nasıl çalıştığını görelim. Elde edilen harita yakınlaştırılabilir, uzaklaştırılabilir, hareket ettirilebilir ve 3D perspektifi ayarlanabilir. Kısacası, yapmak istediğiniz şeyi takip edin.
Seeed şimdi Slamtec Mapper M1M1 ToF Lazer Tarayıcı Kiti – 20M Menzil için ücretsiz kargo sunuyor. Bununla uğraşmaktan keyif almanızı umuyoruz.
