Ortak hikayesi: Cogniteam, ROS geliştirme döngüsünü yönetilebilir hale getiriyor
Cogniteam, ROS’un öncüsü olan Player/Stage’i erken benimseyenlerden biriydi. O zamanlar, satıcılar Robot İşletim Sistemi heyecanına katılmakta tereddüt ediyorlardı. Genel protokoller, yazılım paketleri ve görselleştirme araçları, her şirketin içsel olarak sürekli geliştirdiği şeylerdi. Linux, akademi ve hackerlar için iyi bir seçenek olarak görülüyordu. O zamanlar, bir sürücüyü çalıştırmak genellikle kendi Linux Kernel’inizi derlemeyi, bazı belirsiz forumlarda mum ışığında okumayı ya da laboratuvar profesörümün dediği gibi “Burada ejderhalar var.” demeyi gerektiriyordu. C++ kodunuzdan gerçek görüntü verilerini akıtmaya başladığınızda, dizüstü bilgisayarınızdaki grafik sürücüsü genellikle uyumsuz bağımlılıklar nedeniyle çalışmayı durdurur ve Ubuntu açılışta çökme yaşardı.

Artık on yıldan fazla zaman geçti. ROS sahneye çıktı ve veri görselleştirmeyi, SLAM algoritmalarını ve robotları yönlendirmeyi, biraz boş zamanı olan ve adım adım bir kılavuzu takip eden herkesin yapabileceği bir şey haline getirdi. Robotik Sensör / Platform satıcıları artık ROS’u kabul ediyor ve donanımı test etmek ve geliştirmek için kullandıkları hazır ROS düğümleri ile git depoları yayımlıyorlar.
Robotik geliştirmede bir değişim
Hazır bileşenler satın almak, kendi robotunuzu inşa etmek hiç bu kadar kolay olmamıştı ve bu, simülasyon araçları ve bulut hakkında konuşmadan önceydi.
Bugünün ROS tabanlı robotları, yeni bir robot içinde tamamen yeni bir ROS sürümü ile değiştirilecektir. Ama eski robot ve eski kod ne oldu? Telefonların böyle davrandığı zamanı hatırlıyor musunuz? FOTA (Firmware Over The Air) öncesi. Uygulama mağazaları öncesi. Android öncesi.
Tüm kurulumları parçalamak ve yeniden bir araya getirmek zordur. Program akışları aktarılabilir değildir. 2012’de ROS’a bazı temel davranış ağaçları karar verme kodu yayımladığımızı biliyoruz. ROS2’ye kadar bir davranış motorunun ilk kez bir ROS standart bileşeni olarak kullanıldığını göremedik. Robotlar arasında move-base’i yeniden yapılandırmayı, TF’leri ayarlamayı ve sensör türü veya konumu değiştiğinde negatif ve pozitif engeller için eşikleri yeniden yapılandırmayı hiç denediniz mi? Simüle edilmiş modelini güncellemek? Satıcının sağladığı çeşitli ROS sürümleri arasında bağımlılıkların karşılandığından emin olmak?
Tekrar başa döndüğümüz gibi görünüyor, değil mi?
Döngüyü kırmak
Nimbus omurgasını kullanmak, ekibinizin içinde tam bir DevOp ekibine sahip olmak gibidir.
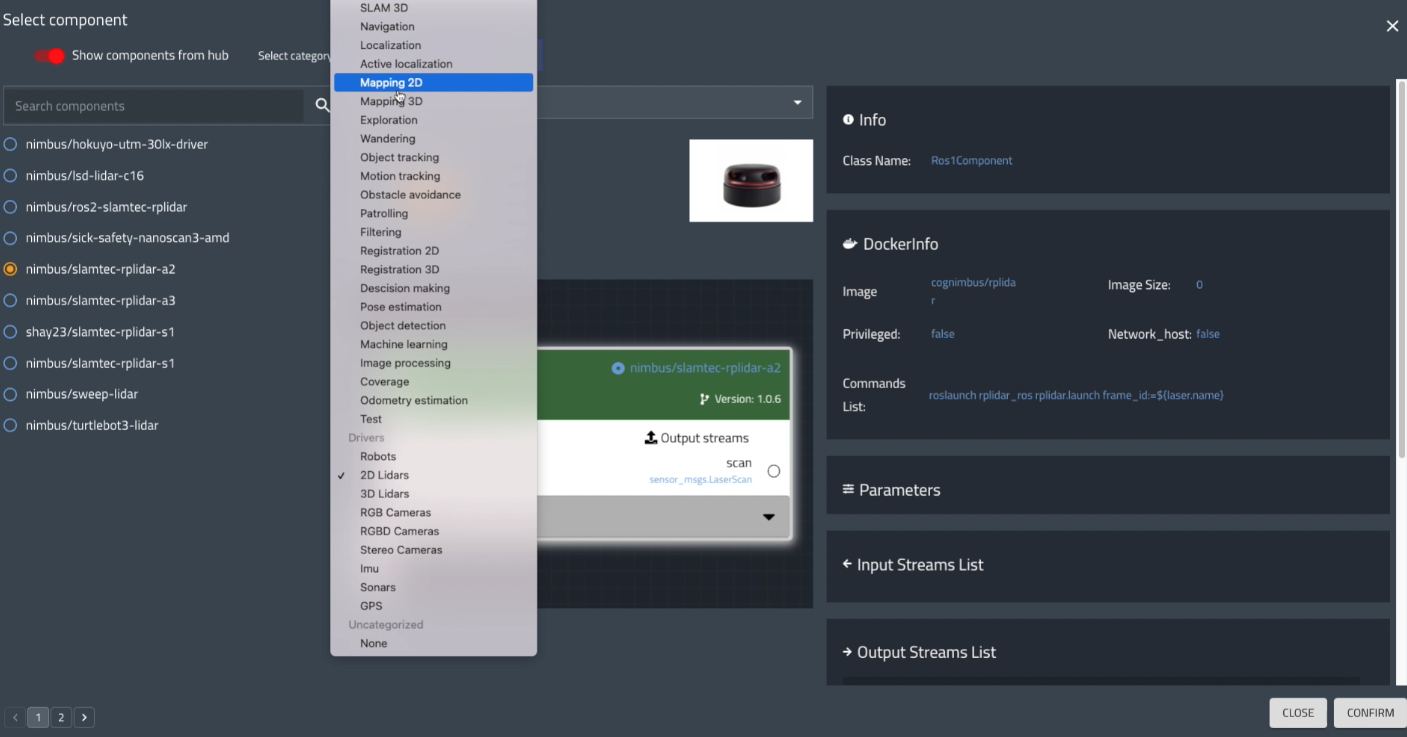
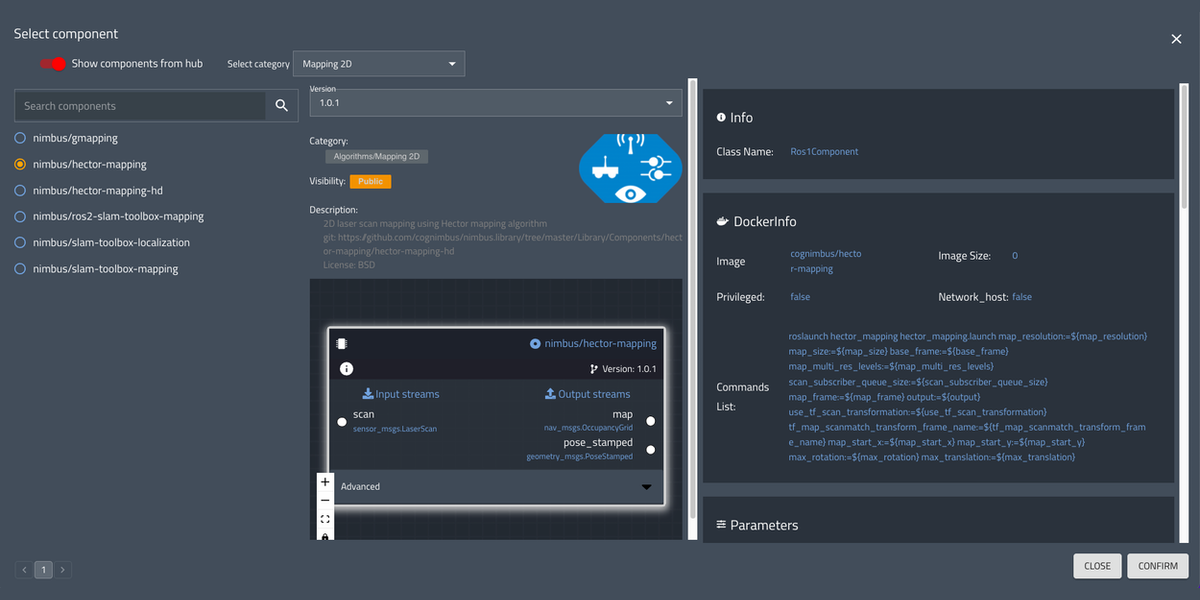
Nimbus, döngüyü kırmak için geliştirme, paketleme, dağıtım ve bulut bağlantılı robotları yönetmek için araçlar sağlayarak bu örneklerle başladı. Nimbus, yazılım bileşenleri olarak konteynerleştirilmiş uygulamalar kullanır. Nimbus’ta, bu yazılım bileşenleri kod, konsol arayüzü veya web üzerinden GUI kullanarak düzenlenebilir, bağlanabilir ve yeniden bir araya getirilebilir, böylece herkes (ROS’a özgü bilgiye sahip olmasa bile) robot yürütmesini oluşturan çeşitli yapı taşlarını anlayabilir ve görebilir. Görevi konteynerleştirilmiş bloklara ayırmanın amacı, OS ve ROS sürümleri arasındaki sorunlu bağımlılığı çözmek ve aynı robot üzerinde ROS1 ve ROS2 bileşenlerini bir arada kullanmayı sağlamaktır.
Bileşenler artık kolayca değiştirilebilir, bu da alternatif algoritmaların test edilmesini kolaylaştırır ve robot erişimi, operatörler ve geliştiriciler arasında paylaşılabilir, böylece robotu her zaman uzaktan erişim sağlanabilir. Bu, robotun kendisine herhangi bir şey yüklemeyi gerektirmez çünkü tüm yüklemeler robot üzerinde bir hizmet olarak çalışan bir ajan tarafından yönetilmektedir. Birden fazla kullanıcı canlı verileri görebilir veya robot yapılandırmasına erişip değiştirebilir. Nimbus omurgasını kullanmak, ekibinizin içinde tam bir DevOp ekibine sahip olmak gibidir.
Döngüyü kırmak
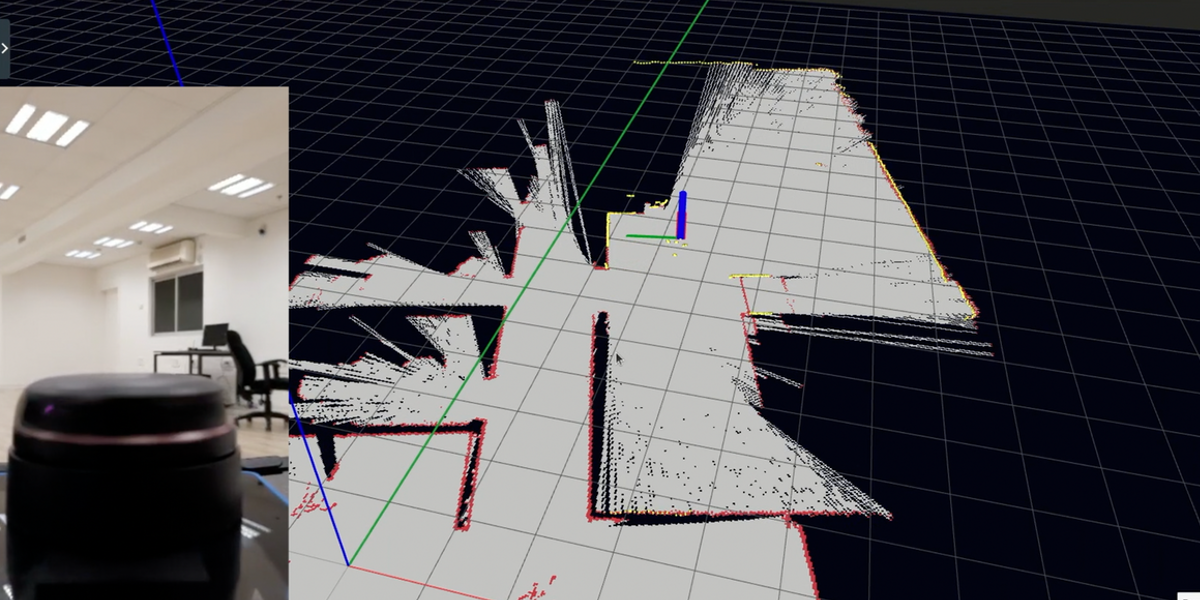
Robot yapılandırması ve onu görüntüleme ve düzenleme araçları, Nimbus’un önemli yönleridir. Nimbus’ta robot modelini inşa ederek (robot sensörlerini ve sürücülerini yapılandırarak), Nimbus sürücü sürümlerini takip edebilir, cihazları izleyebilir, TF’ler (bileşenlere koordinasyon dönüşüm hizmetleri) oluşturabilir ve kodunuz için bir simülasyon otomatik olarak oluşturabilir, böylece sensör konumunu/tipini değiştirebilir ve alternatif senaryoları simüle ederek test edebilirsiniz – tüm bunları herhangi bir kodlama olmadan. Nimbus ayrıca içgörü, görselleştirme sağlar ve yakında robotların geliştirilmesini kolaylaştıracak analitik araçlar sunacaktır ve robotik devrimi başlatacaktır.
Giriş yapın, hemen geliştirmeye başlayın ve gelecek için bizi izlemeye devam edin.
Seeed, Cogniteam ile ortak olmaktan mutluluk duyarak, prototiplemeden üretime kadar en kolay robot geliştirme sürecini sunmayı hedefliyor; bu süreç yapılandırma, test, dağıtım ve operasyon yönetimini içerir. Seeed’in Jetson Platform taşıyıcı kartları ve Jetson Sub kiti ile Nimbus’u deneyin, RPLidar ve kameralar gibi sensörleri ekleyerek robotik uygulamanızı sıfırdan oluşturun. Mevcut ROS projelerinizi Nimbus’a sorunsuz bir şekilde bağlayabilirsiniz. Açık kaynak Robot İşletim Sistemi (ROS) temelinde, Nimbus gerçekten bir ‘tak ve çalıştır’ çözümüdür.
Geliştiriciler, ihtiyaç duydukları her şeyi bir arada bulabilir, bilgisayar donanımı, sensörler ve sadece sürükleyip bırakma ile.
Nimbus yazılımını kullanarak, dinamik ortamlarda karmaşık görevleri yerine getirebilen robotlar inşa edin; burada tüm olası kararları öngörmek imkansızdır.
Geliştiriciler, robotların performansını gerçek zamanlı olarak izleyebilir. Robotlar, doğrudan birbirleriyle veya Bulut üzerinden iletişim kurarak kendi deneyimlerinden faydalanabilirler. Birlikte kolektif kararlar alabilir, görevleri paylaşabilir ve gerçek zamanlı olarak değişen senaryolarla başa çıkmak için yeniden plan yapabilirler.
Nimbus, Seeed’de bulabileceğiniz aşağıdaki donanımları destekler.
- NVIDIA® Jetson Nano™ Geliştirici Kiti
- NVIDIA® Jetson Xavier™ NX Geliştirici Kiti
- Jetson SUB Mini PC
- A203 (Sürüm 2) Taşıyıcı Kart
- A205 Taşıyıcı Kart
- A206 Taşıyıcı Kart
- RPLiDAR A2M8 360 Derece Lazer Tarayıcı Kiti – 12M Menzil
- RPLiDAR A1M8-R6 360 Derece Lazer Tarayıcı Kiti – 12M Menzil
- RPLiDAR A3M1 360 Derece Lazer Tarayıcı Kiti – 25M Menzil
Nimbus platformunu keşfedin