
İklim değişikliği nedeniyle, Arctic, gezegenin geri kalanından iki ila dört kat daha hızlı ısınıyor (BBC News: İklim değişikliği Arctic’teki evleri yok ediyor, 2022, Ocak). Arctic ortamı, deniz buzu ile küresel biyogeokimyasal döngüleri etkileyen dramatik değişimler geçiriyor. Güçlü bir buz altı algılama tekniğinin eksikliği nedeniyle, gaz kabarcıkları, taban buzu erimesi ve deniz buzu alg patlamalarının tetikleyicileri gibi biyogeokimyasal süreçlerin araştırılması, buzla kaplı alanlarda sınırlı kalmaktadır.
AUV’ler ve ROV’ler Okyanus Araştırmalarına Yardımcı Oluyor
Otonom Su Altı Araçları (AUV’ler), buzun altında küçük ölçekli biyogeokimyasal süreçlerin yüksek çözünürlüklü mekansal kapsama alanını elde etmek için çok umut verici bir araçtır. AUV, batık gemileri ve kayaları tespit etmek ve haritalamak gibi su altı görevleri için kullanılabilir. AUV’lerin neredeyse tamamı başlangıçta açık su uygulamaları için geliştirilmiştir. Uzaktan Kumanda Edilen Araçlar (ROV’ler), bir gemiye bağlı insansız su altı araçlarıdır. Bu kablolar, operatör ile ROV arasında kontrol komutlarını iletmek için iki yönlü iletişim sağlar ve ROV’nin video görüntü geri bildirimi ile uzaktan gezinmesine olanak tanır.
Taşınabilir ROV Kullanarak Buz Altı Algılama Yönünde
2020 yılından itibaren, Rhode Island Üniversitesi’nden Akıllı Okyanus Sistemleri Laboratuvarı, Buz-su Sınırında İnsansız Su Altı Araçlarını Yönlendirme projesi üzerinde çalışmaktadır. Proje ekibi, Taşınabilir ROV Kullanarak Buz Altı Algılama başlıklı son makalelerinde, taşınabilir bir ROV kullanarak buz altı algılama konusundaki ilerlemelerini bildirmiş ve küçük ROV’lerin (0.7m uzunluğunda ve 0.5m genişliğinde) kıyıya yakın buz altı ortamını örnekleme konusundaki uygulanabilirliğini göstermiştir. Son saha denemeleri Mart 2022’de Alaska’nın Utqiagvik bölgesinde gerçekleştirilmiştir.

BlueROV2 ile Gömülü Sistem, ek sensörler ve NVIDIA Jetson.
Buz altı ROV, BlueROV-2 platformu temel alınarak bir test ortamı olarak geliştirilmiştir çünkü BlueROV, açık kaynak kontrol yazılımı ve kullanıcı arayüzü yazılımı ile birlikte gelmektedir. İyi bir konumlandırma sonucu için temel BlueROV modelinde sensör eksikliği nedeniyle, proje ekibi, aracın görsel algılama ve navigasyonunu büyük ölçüde geliştirmek için bir dizi sensör entegre etmiştir. Profesör Mingxi Zhou, ayrıca tüm ek sensörlerle etkileşim kurmak için NVIDIA Jetson NX Xavier ile güçlendirilmiş Seeed’in mini PC’sini entegre ettiklerini bizimle paylaşmıştır. Üst bilgisayarda, uzaktan kontrol için BlueROV kullanıcı arayüzü ve algısal sensör ölçümlerini görselleştirmek için özelleştirilmiş bir RViz arayüzü bulunmaktadır.
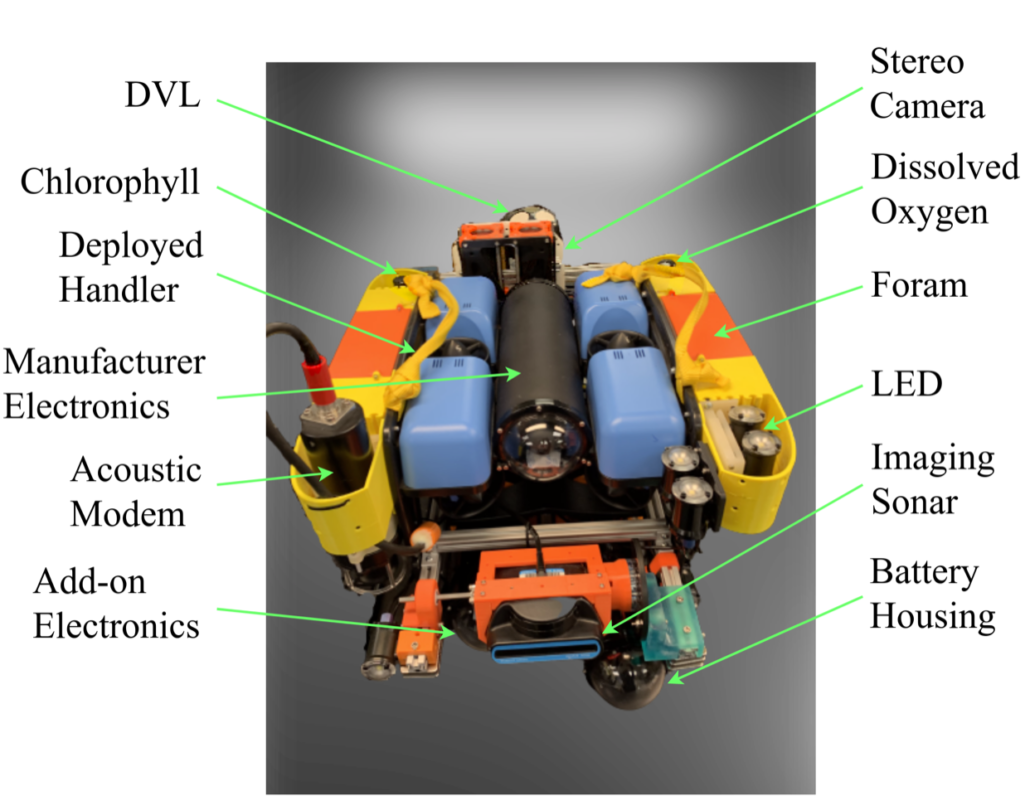
Geliştirilmiş ROV’nin bir fotoğrafı Şekil 2’de gösterilmektedir. Buz altı ROV, BlueROV-2 temel alınarak geliştirilmiştir. ROV’nin yer doğrulama konumlandırması, araç tarafında bir Evologics 18/34 Akustik modem ve eşleşen bir üst yüzey Ultra-kısa baz (USBL) cihazı kullanılarak elde edilmiştir. Bu arada, ROV pilotu için AHRS ve DVL’den birleştirilmiş bir odometri mevcuttu. Su sütunundaki biyokimyasal aktiviteleri karakterize etmek için bir RBR çözünmüş oksijen optodu ve bir Turner Design klorofil sensörü entegre edilmiştir.
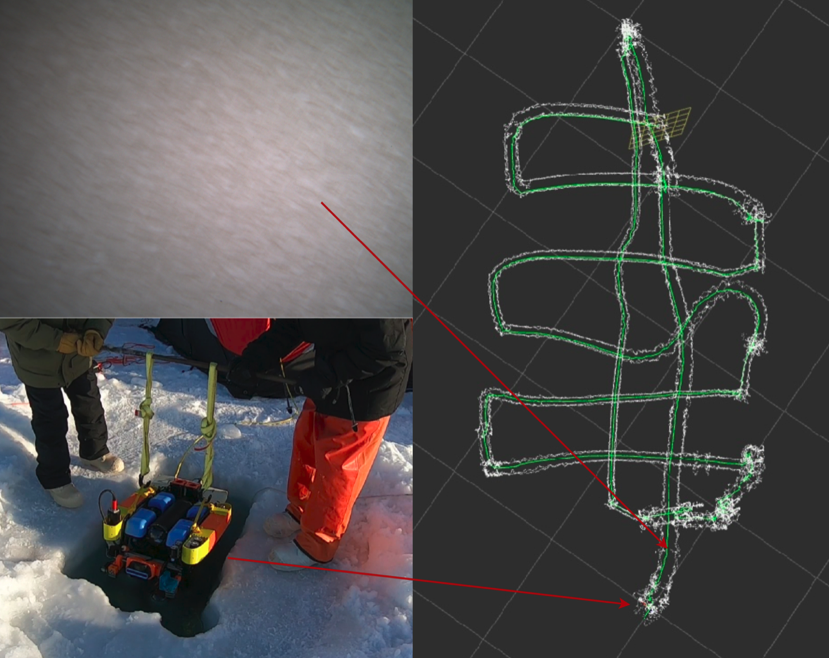
Saha testleri Mart 2022’de Alaska’nın Utqiagvik bölgesinde, kıyıdan birkaç yüz metre uzakta düz bir kara buzu üzerinde gerçekleştirilmiştir. Buz kalınlığı yaklaşık 1.5 metreydi. Şekil 3’te gösterildiği gibi, ROV, uçlarında kancalar bulunan kayışlar kullanılarak dikdörtgen bir buz deliğinden aşağıya indirilmiştir. Kurtarma, ROV’yi deliğe manuel olarak yönlendirerek yapılmış, ardından kayışlar ROV’yi kaldırmak için kancalanmıştır.
BlueROV2 Hakkında
BlueROV2, dünyanın en uygun fiyatlı yüksek performanslı ROV’sidir. 6 itici vektörlü yapılandırması, açık kaynaklı elektronik ve yazılımı ve genişletilebilirliği ile denetim, araştırma ve macera için mükemmel bir ROV’dir.

Sub Mini PC Hakkında
Jetson SUB Mini PC-Blue, NVIDIA Jetson Xavier NX modülüne dayanmaktadır ve 21 TOPS’a kadar performans sunarak gömülü ve kenar sistemlerinde yüksek performanslı AI iş yükleri için idealdir. Mini PC, taşıyıcı kart, önceden kurulu ısı emici, Jetpack, 128GB SSD ve kasa ile birlikte gelir. Ayrıca, 8GB/16GB Jetson Xavier NX modülü ile donatılmış en son reComputer J20’yi de inceleyebilirsiniz.

Jetson için reComputer serisi, NVIDIA’nın gelişmiş AI gömülü sistemleri ile inşa edilmiş kompakt kenar bilgisayarlardır: J10 (Nano 4GB) ve J20 (Xavier NX). Zengin genişletme modülleri, endüstriyel çevresel birimler, termal yönetim ile reComputer for Jetson, popüler DNN modellerini ve ML çerçevelerini kenara dağıtarak ve yüksek performansla çıkarım yaparak, gerçek zamanlı sınıflandırma ve nesne tespiti, poz tahmini, anlamsal segmentasyon ve doğal dil işleme (NLP) gibi görevleri hızlandırmanıza ve ölçeklendirmenize yardımcı olmaya hazırdır.

Jetson Xavier NX, TensorFlow, PyTorch, Caffe/Caffe2, Keras, MXNet ve diğer popüler ML çerçevelerinin tam yerel sürümleri de dahil olmak üzere çok çeşitli gelişmiş ağları çalıştırabilir.
Jetson için reComputer, tüm NVIDIA Jetson yazılım yığını, endüstri lideri AI çerçeveleri, Edge Impulse, AlwaysAI gibi geliştirme platformları ve bulut tabanlı robot geliştirme aracı Nimbus ile uyumludur.