
Arduino kullanırken, yapabileceğiniz birçok proje ve şey var ve bunlardan biri bir motor sürmektir! Bugün, bu eğitim aracılığıyla, Arduino ile sürebileceğiniz 3 temel motora odaklanacağız: DC motor, Servo motor ve Stepper motor.
Bugünkü kılavuz şunları kapsayacak:
- DC, Servo ve Stepper Motor’a Giriş
- Her motor ne zaman kullanılmalı?
- Seeed’in Arduino Motor Paketi ile Başlarken
- Arduino DC Motor Eğitimi
- Arduino Servo Motor Eğitimi
- Arduino Stepper Motor Eğitimi
DC, Servo ve Stepper Motor’a Giriş
DC Motor
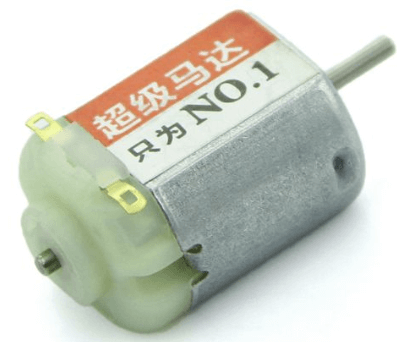
DC Motor Nedir?
DC Motor, doğru akım elektrik enerjisini mekanik enerjiye dönüştürebilen döner bir elektrik makinesidir. Elektrik enerjisini mekanik enerjiye dönüştürerek çalışabilen bir motordur. Buna karşılık, AC güç kullanan motor AC motordur.
DC Motor şunlardan oluşur:
- Stator
- Rotor
DC motorun statik kısmına stator denir ve ana işlevi bir manyetik alan oluşturmaktır. Çalışma sırasında dönen kısma rotor denir ve ana işlevi elektromanyetik tork ve indüklenmiş elektromotor kuvveti üretmektir, genellikle armature olarak da adlandırılır.
DC motor neden dönebilir?
Bu, sol el kuralı nedeniyle. Akım rotor üzerinden geçtiğinde, rotor manyetik alanda bir kuvvet üretir ve bu kuvvet döner. Akım geçtiğinde, motorun içindeki iki manyetik alan arasındaki zıt polarite, motorun akım durana kadar sürekli bir yönde dönmesini sağlar.
DC motorların polaritesi yoktur ( + veya – ile işaretlenmedikçe), bu da motorun yönünü iki kabloyu değiştirerek tersine çevirebileceğiniz anlamına gelir.
Temelde, bir DC motorun iki ucu (pozitif ve negatif) doğrudan bir güç kaynağına bağlandığında, motor dönecek ve bir yönde hareket edecektir. Uçlar değiştirildiğinde, motor ters yönde dönecektir.
DC motorun Avantajları
- Akıcı hız düzenlemesi
Yük değişmediğinde, DC motor üzerindeki voltajı değiştirerek hız geniş bir aralıkta kolayca ayarlanabilir.
- Yüksek başlangıç torku
DC motorların yüksek başlangıç torku ile, ağır yükleri başlatma koşullarında sürmek için çok uygundur. DC motorların bir uygulama örneği elektrikli trenler ve vinçlerdir.
- Harmonik içermezler
Diğer harmonik motorlarla karşılaştırıldığında, DC motorlar daha verimli, daha enerji tasarruflu ve daha uzun bir hizmet ömrüne sahiptir.
DC motorun Dezavantajları
- Patlayıcı veya tehlikeli koşullarda kullanıma uygun değildir, çünkü fırça kıvılcım üretebilir ve bu da komütasyon hatasına neden olabilir.
- Komütatör ve fırça dişlisi nedeniyle, işletme ve bakım maliyetleri artar.
Servo Motor

Servo Motor Nedir?
Servo motor, açısal pozisyonun hassas kontrolünü sağlayan döner bir aktüatördür. Bu, kapalı döngü sistemlerinde hassas pozisyon kontrolü gerektiğinde kullanılmak üzere uygundur ve genellikle elektroniklerde kullanılır.
Servo motorlar, kapalı döngü sisteminin bir parçasıdır ve yüksek verimlilikle makine parçalarını döndüren kendi kendine yeterli bir elektrik cihazıdır.
Servo Motorlar şunlardan oluşur:
- Kontrol Devresi
- Küçük DC Motor
- Potansiyometre
Servo motorun çalışma prensibi
Motor, dönerken potansiyometre direncinin değiştiği kontrol tekerleğine dişlilerle bağlıdır, böylece kontrol devresi hareket miktarını ve yönünü hassas bir şekilde düzenleyebilir.
Motor, hareket miktarını belirleyen bir elektrik sinyali ile kontrol edilir; bu sinyal analog veya dijital olabilir ve bu, şaft için son komut pozisyonunu temsil eder.
Kapalı döngü mekanizması ile, döner veya lineer hız ve pozisyonu kontrol etmek için konumsal geri bildirim içerir. Bir dizi açı belirlenir ve çalışma açısı için 120 derece notasyonu vardır.
Servo motorun Avantajları
- Motor boyutuna ve ağırlığına göre yüksek çıkış gücü
- Yüksek verimlilik
- Hafif yüklerde %90’a kadar yaklaşabilir
- Hız ve tork kontrolü için geri bildirim.
- Encoder doğruluğu ve çözünürlüğü belirler.
- Encoder kullanımı, kapalı döngü kontrolü ile daha yüksek doğruluk ve çözünürlük sağlar.
- Yüksek Tork-ağırlık oranı
- Servo Motorlar yükleri hızlı bir şekilde hızlandırabilir.
- Rezonans ve titreşimsiz çalışma
- Yüksek hızlı çalışma mümkündür
- Servo motorlar yüksek tork değerlerinde yüksek hız elde edebilir
Servo motorun Dezavantajları
- Geri bildirim döngüsünü stabilize etmek için ayar gerektirir.
- Servo motorlar bir şey bozulduğunda öngörülemezdir
- Bu nedenle, güvenlik devreleri gereklidir.
- Karmaşık kontrol cihazı, encoder ve elektronik destek gerektirir.
- Servo Motor, sürekli aşırı yüklenmeden zarar görebilir
- Tepe torku %1 görev döngüsü ile sınırlıdır
- Maliyeti stepper motordan daha yüksek olabilir
- Geri bildirim bileşenleri gereksinimi, genel sistem maliyetini ve kurulum maliyetini artırabilir; bu, stepper motorlara kıyasla daha yüksek olabilir.
- Daha yüksek hızlarda güç sağlamak için genellikle dişli kutuları gereklidir.
Stepper Motor
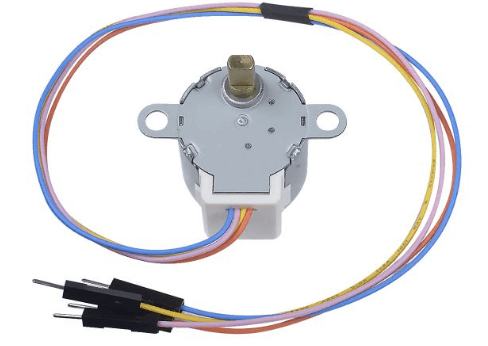
Stepper Motor Nedir?
Stepper motor, elektriksel darbe sinyallerini karşılık gelen açısal yer değiştirmeye (lineer yer değiştirme) dönüştüren bir motordur. Her seferinde bir darbe sinyali girişi olduğunda, rotor bir açı (bir adım ileri) döner ve çıkış açısal yer değiştirmesi (lineer yer değiştirme) giriş darbelerinin sayısına orantılıdır ve hız, darbe frekansına orantılıdır.
Bir dijital darbe, bir stepper motor sürücüsüne veya çeviriciye uygulandığında, motoru bir kesin hareket açısı kadar artırır. Dijital darbelerin frekansı arttığında, adım hareketi sürekli döngüye dönüşür.
Stepper motorun bir uygulaması, bir robot kolunun veya bacağının tam bir açıya hareket etmesini istediğinizde, bir şişe gibi bir şeyi yakalaması için mükemmel olacaktır! Diğer motorlarla karşılaştırıldığında, kolun veya bacağın açısını kontrol edemezsiniz; bunun yerine, motorun gücüne ve üzerinden geçen elektrik akımına bağlı olacaktır.
Stepper motorların Özellikleri
- Stepper motorun her devri, ayrı açısal hareketlere ve adımlara bölünmüştür; motor her hareket için ayrı bir darbe almalıdır.
- Stepper motor yalnızca bir adım atabilir ve her adım aynıdır.
- Bilgisayar kontrollü adımlama ile, hassas konumlandırma ve/veya hız kontrolü kolayca elde edilebilir.
- Bu özellik, stepper motorları hassas hareket kontrol uygulamaları için çok uygun hale getirir.
Birden fazla bobinden oluşurlar ve bu bobinler “fazlar” olarak adlandırılan gruplar halinde düzenlenmiştir.
Stepper motorun Avantajları
- Mükemmel düşük hız torku
Stepper motorlar mükemmel düşük hız torku sunar. Bu, motorun birçok yükü ek dişli veya dişli kutusu mekanizmaları kullanmadan sürmesine olanak tanır.
- Daha güvenli
Servo motorlarla karşılaştırıldığında, stepper motor bozulursa otomatik olarak durur.
- Daha uzun ömür
Stepper motorun birçok hareketli parçası sürtünmesizdir. Bu nedenle, stepper motorlar daha uzun bir ömre sahip olarak kabul edilir; çünkü stepper motorun yatakları, aşınma ve yıpranma ile etkilenen tek parçadır.
Ayrıca, motor içinde temas fırçaları olmadığı için oldukça güvenilirdirler.
- Servo Motorlara kıyasla daha düşük maliyet
Stepper motorlar, konumsal veya tork geri bildirimi gerektirmeyen açık döngü sistemlerinde kullanılır; bu da kontrolü daha basit ve daha az maliyetli hale getirir.
Ayrıca, kurulum ve kullanım açısından daha kolaydırlar. Servo motorlarla karşılaştırıldığında, düşük ivme ve yüksek tutma uygulamaları için daha uygundurlar.
Stepper motorun Dezavantajları
- Düşük Verimlilik
DC motorların aksine, stepper motor akım tüketimi yükten bağımsızdır. Yükten bağımsız olarak önemli miktarda güç çekerler.
Stepper motorlar boşta kaldıklarında en fazla akımı çekerler ve bu da onların ısınmasına neden olur.
- Geri bildirim yok
Servo motorlarla karşılaştırıldığında, stepper motorların pozisyon için entegre bir geri bildirimi yoktur.
Açık döngü ile hassasiyet elde edebilseniz de, güvenlik ve/veya bir referans pozisyonu belirlemek için genellikle limit anahtarları veya ‘ev’ dedektörleri gereklidir.
Geri bildirim olmadan, potansiyel kaybedilen adımları belirleyemezsiniz.
- Moment, hızla birlikte hızla düşer / Sınırlı Yüksek Hız Moment
Adım motorları, yüksek hızlarda düşük hızlara göre daha az torka sahiptir.
Bazı adım motorları daha iyi yüksek hızlı performans için optimize edilmiş olsa da, bu performansı elde etmek için uygun bir sürücü ile eşleştirilmelidir.
- Daha yüksek bir hıza ulaşmak zordur
Yük aşıldığında, senkronizasyon bozulacak ve yüksek hızda çalışırken titreşim ve gürültü yayılacaktır.
Her motor ne zaman kullanılmalı?
Arduino projelerinizde farklı motorlar kullanırken, ihtiyaçlarınıza en uygun motoru seçmelisiniz. Her motorun kendine özgü kullanımları, avantajları ve dezavantajları vardır, bunları ele alacağız.
DC Motor
DC motorun uygulaması
- DC motorlar birçok yerde yaygın olarak kullanılmaktadır. Bunlardan bazıları elektrikli süpürgeniz, saç kurutma makineniz, asansörler, otomobillerdeki elektrikli pencereler vb.
- DC motorlar, yüksek başlangıç torku (Yüksek dirençli torklarla başa çıkabilme ve yükteki ani artışları zahmetsizce emme yeteneği), basitlik ve diğer motorlarla karşılaştırıldığında verimlilik nedeniyle hala yaygın olarak kullanılmaktadır.
Servo Motor
Servo motorun uygulaması
Yüksek hassasiyet gerektiren alanlar, makine aletleri, ambalaj ekipmanları, tekstil ekipmanları, lazer işleme ekipmanları, robotlar, otomatik üretim hatları ve nispeten yüksek işlem hassasiyeti gerektiren diğer ekipmanlar.
Adım Motorları
Adım motorunun uygulaması
Temelde, ATM makineleri, mürekkep püskürtmeli yazıcılar, plotterlar, püskürtme ekipmanları, tıbbi aletler ve ekipmanlar, hassas aletler, endüstriyel kontrol sistemleri vb. gibi konumlandırma ile ilgili durumlarda kullanılabilir.
Başlamak için Seeed’s Arduino Motor Pack
Tutoriallara geçmeden önce, motorlara ihtiyacınız olacak! Seeed’de, kendi Arduino Motor Pack‘imizi sunuyoruz!

- Bu paket, Arduino ile motor öğrenimi için mükemmel bir settir. Projeniz bir DC motor, bir adım motoru veya bir direksiyon dişlisi gerektiriyorsa, bu kitte bulunabilir!
- Bu kit şunları içerir
- 6V DC motor(13000 rpm ±14%) x2
- Küçük adım motoru x1
- Standart servo x1(Hız: 0.17/60°@4.8V; 0.14/60°@6.0V)/(Tork: 3.5kg.cm@4.8V; 4.8kg.cm@6.0V)
- Micro servo x1(Hız: 0.12/60°@4.8V; 0.10/60°@6.0V)/(Tork: 1.5kg.cm@4.8V; 1.8kg.cm@6.0V)
- Kitin çok pahalı olduğunu mu düşünüyorsunuz? Endişelenmeyin!

Şu anda, bu Arduino Motor Pack için sınırlı bir süreliğine büyük bir indirim yapıyoruz!!!
Kodu kullanın: MOTOR40 şimdi %40 indirim almak için Arduino motor paketimizde !
Daha fazla uzatmadan, Arduino ile bireysel motorları nasıl çalıştıracağımıza geçelim!
Arduino Motor Eğitimi
Başlamadan önce, herhangi bir motoru doğrudan Arduino kartı pinlerinden sürmemeniz gerektiğini unutmayın, çünkü bu kartı zarar verebilir! Onları sürmek için bir sürücü devresi veya motor sürücüsü kullanmalısınız!
Arduino DC Motor Eğitimi
Bu eğitimde, DC motoru sürmek için bir Arduino motor kalkanı kullanacağız:
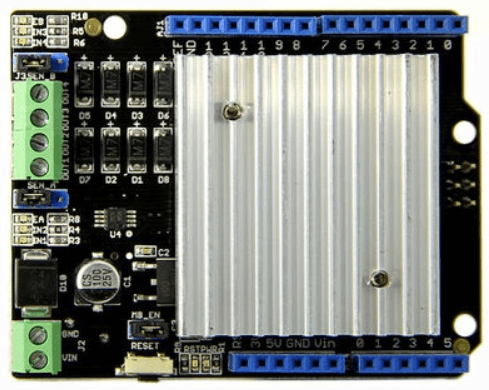
- Motor Kalkanı, motorları kontrol etmenizi sağlayan bir sürücü modülüdür ve Arduino ile motorun çalışma hızını ve yönünü kontrol etmenizi sağlar.
- Çift Tam Köprü Sürücü Çipi L298’e dayanmaktadır, iki DC motoru veya bir adım motorunu sürme yeteneğine sahiptir. L298’in ne olduğunu bilmiyorsanız, L298 motor sürücüsü ile ilgili diğer blogumuza buradan göz atabilirsiniz!
- Peki, bir DC motoru Arduino motor kalkanı ile nasıl sürersiniz?
Ne gerekiyor?
- Seeeduino V4.2 (Arduino UNO Uyumlu Kart)
- 130 DC Motor
- Motor Shield V2.0
- Jumper Kablolar
Motor Kalkanı ile DC motoru sürmek için adım adım talimatlar
- Adım 1
- SEN_A ve SEN_B ayarlarını yapın ve sol 2 pini bir jumper ile bağlayın.
- Adım 2
- MB_EN bağlayın, çünkü harici bir güç kullanmayacağız.
- Adım 3
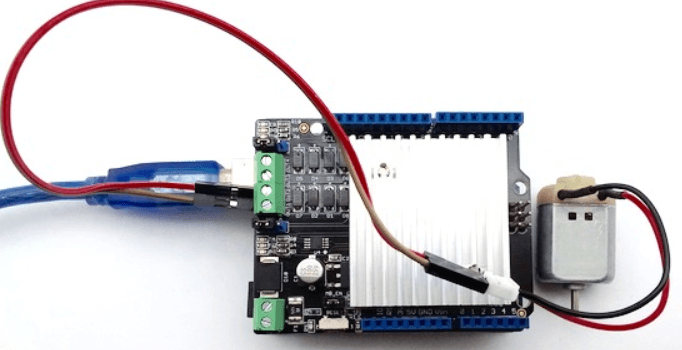
- DC motoru Kanal 0’a (OUT1 ve OUT2) bağlayın ve Motor Kalkanını Arduino’ya takın.
- Arduino’yu bir USB kablosu ile PC’ye bağlayın.
- Bağlantınız şöyle görünmelidir:
- Adım 4
- Motor kalkanı kütüphanesini buradan indirin ve kütüphaneyi kurun
- Arduino kütüphanesini nasıl kuracağınızı bilmeyen kullanıcılar için, Arduino kütüphanesi nasıl kurulur konulu kılavuzumuzu takip edebilirsiniz.
- Adım 5
- Aşağıdaki kodu Seeeduino’ya yükleyin:
// Demo fonksiyonu: DC motoru sürmek için uygulama yöntemi.
// Yazar:Loovee (luweicong@seeed.cc)
// 2016-3-11
#include "MotorDriver.h"
MotorDriver motor;
void setup()
{
// başlat
motor.begin();
}
void loop()
{
motor.speed(0, 100); // motor0'ı 100 hızına ayarla
delay(1000);
motor.brake(0); // fren
delay(1000);
motor.speed(0, -100); // motor0'ı -100 hızına ayarla
delay(1000);
motor.stop(0); // dur
delay(1000);
}
// DOSYA SONUMotorunuz 1 saniye hareket etmeli, bir saniye durmalı, 1 saniye geri hareket etmeli, bir saniye durmalı ve döngüye girmelidir. Hiçbir şey olmuyorsa, lütfen şunları kontrol edin:
- Kod başarıyla yüklendi
- Motor doğru şekilde bağlandı
- LED göstergeleri doğru şekilde yanıp sönüyor
Hepsi bu kadar! 5 adımda bir DC motoru Arduino Motor kalkanı ile çalıştırmayı başardınız!
Arduino Servo Motor Eğitimi
Bu eğitimde, Arduino’nuzla bir Servo Motoru 3 basit adımda nasıl kontrol edeceğinizi öğreneceksiniz.
“`html
Neye ihtiyacınız var?
- Seeeduino V4.2 (Arduino UNO Uyumlu Kart)
- Grove – Servo
- Base Shield V2 (Kolay bağlantı için)
Arduino ile Servo Motoru nasıl çalıştıracağınız hakkında adım adım talimatlar
- Adım 1: Servoyu Seeeduino’ya bağlayın
- Servo üç kabloya sahiptir: güç, toprak ve sinyal.
- Püskürtme kablosu genellikle kırmızı olup, Arduino/Seeeduino kartındaki 5V pinine bağlanmalıdır.
- Toprak kablosu genellikle siyah veya kahverengi olup, Arduino kartındaki bir toprak pinine bağlanmalıdır.
- Sinyal pini genellikle sarı, turuncu veya beyaz olup, Arduino kartındaki D5 pinine bağlanmalıdır.
- Dijital portu istediğiniz gibi değiştirebilirsiniz, ancak demo kodunun tanımındaki port numarasını değiştirmeyi unutmayın!
- Adım 2: Modülü PC’ye bağlayın
- Modülü Base Shield üzerindeki D5 portuna bağlayın
- Grove-Base Shield’i Arduino’ya takın
- Arduino’yu bir USB kablosu ile PC’ye bağlayın.
- Adım 3: Yazılım
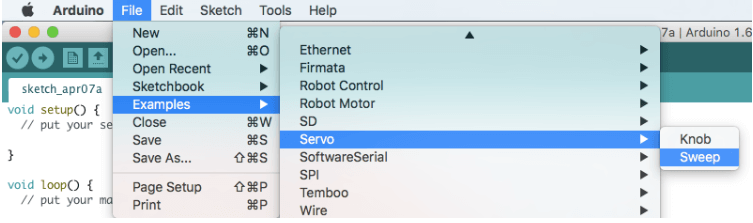
- Arduino Servo Kütüphanesini kullanarak bir servonun milini 180 derece ileri geri hareket ettireceğiz. Arduino Servo Kütüphanesi.
- Kodu doğrudan şu yoldan açın: Dosya -> Örnekler -> Servo -> Sweep.
/* Sweep
by BARRAGAN <http://barraganstudio.com>
Bu örnek kod kamuya açıktır.
8 Kasım 2013'te değiştirildi
Scott Fitzgerald tarafından
http://www.arduino.cc/en/Tutorial/Sweep
*/
#include <Servo.h>
Servo myservo; // bir servoyu kontrol etmek için servo nesnesi oluştur
// çoğu kartta on iki servo nesnesi oluşturulabilir
int pos = 0; // servo pozisyonunu saklamak için değişken
void setup() {
myservo.attach(5); // servoyu 5 numaralı pine bağlar
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // 0 dereceden 180 dereceye gider
// 1 derece adımlarla
myservo.write(pos); // servoya 'pos' değişkenindeki pozisyona gitmesini söyler
delay(15); // servonun pozisyona ulaşması için 15ms bekler
}
for (pos = 180; pos >= 0; pos -= 1) { // 180 dereceden 0 dereceye gider
myservo.write(pos); // servoya 'pos' değişkenindeki pozisyona gitmesini söyler
delay(15); // servonun pozisyona ulaşması için 15ms bekler
}
}Ve işte bu kadar! Sketch’i yükledikten sonra, Servonun hareket ettiğini görmelisiniz.
Arduino Stepper Motor Eğitimi
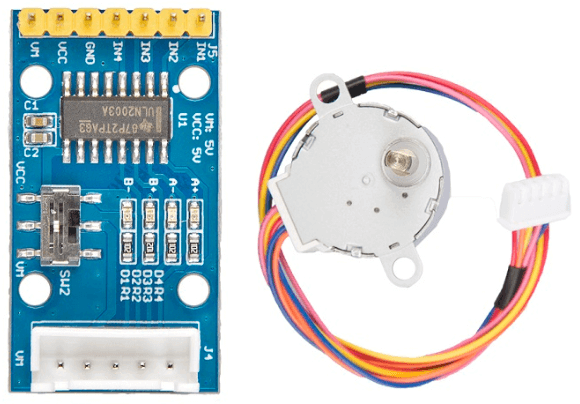
Bu eğitimde, bir stepper motor ve bir motor sürücü kartı içeren Gear Stepper Motor Driver Pack kullanacağız. Bu, dört fazlı sekiz adımlı bir stepper motordur ve bu stepper motoru sürücü kartı aracılığıyla kolayca kontrol edebilirsiniz. Bu paketi pozisyon kontrolü için de kullanabilirsiniz.
Neye ihtiyacınız var?
- Seeeduino V4.2 (Arduino UNO Uyumlu Kart)
- Gear Stepper Motor Driver Pack
- Jumper Kablolar
Arduino ile Stepper Motoru nasıl çalıştıracağınız hakkında adım adım talimatlar
- Adım 1
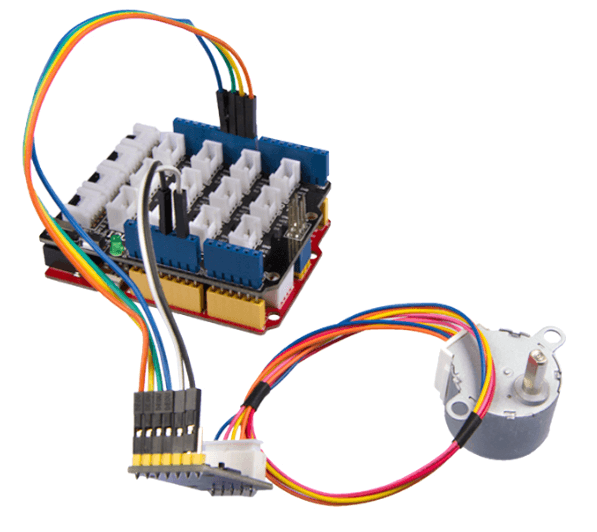
- Gear Stepper Motor Sürücü Kartını jumper kabloları aracılığıyla Seeeduino’nuzla bağlayın
| Seeeduino V4.2 | Gear Stepper Motor Sürücü Kartı |
| Dijital Pin 8 | IN1 |
| Dijital Pin 9 | IN2 |
| Dijital Pin 10 | IN3 |
| Dijital Pin 11 | IN4 |
| GND | GND |
| VCC_5V | VCC |
| VCC_5V | VM |
VM pinini VCC_5V’ye bağlayabilir veya anahtardaki VCC’yi seçtiğiniz sürece kullanmayabilirsiniz.
“`
- Adım 2
- Stepper motoru Gear Stepper Motor Driver Board’a takın.
- Adım 3
- Seeeduino’yu bir USB kablosu ile PC’ye bağlayın.
- Bağlantınız şimdi şöyle görünmelidir:
- Adım 4
- Aşağıdaki kodu Arduino IDE’de yeni bir skeç içine kopyalayın.
int pwm1=9;
int pwm2=10;
int ctr_a =9;
int ctr_b =8;
int ctr_c =11;
int ctr_d =10;
int sd =6;
int i=0;
int t=1500;
void setup()
{
//pinMode(sd,OUTPUT);
//pinMode(pwm1,OUTPUT);
//pinMode(pwm2,OUTPUT);
pinMode(ctr_a,OUTPUT);
pinMode(ctr_b,OUTPUT);
pinMode(ctr_c,OUTPUT);
pinMode(ctr_d,OUTPUT);
delay(1);
//digitalWrite(sd,HIGH);
//digitalWrite(pwm1,HIGH);
//digitalWrite(pwm2,HIGH);
// digitalWrite(ctr_a,LOW);
// digitalWrite(ctr_b,LOW);
// digitalWrite(ctr_c,LOW);
// digitalWrite(ctr_d,LOW);
}
void loop ()
{
// for(i=1500;i>=1;i--)
// {
// digitalWrite(ctr_a,HIGH);//A
// digitalWrite(ctr_b,LOW);
// digitalWrite(ctr_c,LOW);
// digitalWrite(ctr_d,LOW);
// delay(t);
// digitalWrite(ctr_a,HIGH);
// digitalWrite(ctr_b,HIGH);//AB
// digitalWrite(ctr_c,LOW);
// digitalWrite(ctr_d,LOW);
// delay(t);
// digitalWrite(ctr_a,LOW);
// digitalWrite(ctr_b,HIGH);//B
// digitalWrite(ctr_c,LOW);
// digitalWrite(ctr_d,LOW);
// delay(t);
// digitalWrite(ctr_a,LOW);
// digitalWrite(ctr_b,HIGH);
// digitalWrite(ctr_c,HIGH);//BC
// digitalWrite(ctr_d,LOW);
// delay(t);
// digitalWrite(ctr_a,LOW);
// digitalWrite(ctr_b,LOW);
// digitalWrite(ctr_c,HIGH);//C
// digitalWrite(ctr_d,LOW);
// delay(t);
// digitalWrite(ctr_a,LOW);
// digitalWrite(ctr_b,LOW);
// digitalWrite(ctr_c,HIGH);//CD
// digitalWrite(ctr_d,HIGH);
// delay(t);
// digitalWrite(ctr_a,LOW);
// digitalWrite(ctr_b,LOW);
// digitalWrite(ctr_c,LOW);//D
// digitalWrite(ctr_d,HIGH);
// delay(t);
// digitalWrite(ctr_a,HIGH);
// digitalWrite(ctr_b,LOW);
// digitalWrite(ctr_c,LOW);//DA
// digitalWrite(ctr_d,HIGH);
// delay(t);
//
// }
// digitalWrite(ctr_a,LOW);
// digitalWrite(ctr_b,LOW);
// digitalWrite(ctr_c,LOW);
// digitalWrite(ctr_d,LOW);
//
//
//
// for(i=1500;i>=1;i--)
// {
//
// digitalWrite(ctr_d,HIGH);//D
// delay(t);
// digitalWrite(ctr_c,HIGH);//DC
// delay(t);
// digitalWrite(ctr_d,LOW);//C
// delay(t);
// digitalWrite(ctr_b,HIGH);//CB
// delay(t);
// digitalWrite(ctr_c,LOW);//B
// delay(t);
// digitalWrite(ctr_a,HIGH);//BA
// delay(t);
// digitalWrite(ctr_b,LOW);//A
// delay(t);
// digitalWrite(ctr_d,HIGH);//AD
// delay(t);
// digitalWrite(ctr_a,LOW);
// digitalWrite(ctr_d,LOW);
// }
for(i=1500;i>=1;i--)
{
digitalWrite(ctr_a,LOW);//A
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,HIGH);
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,LOW);
digitalWrite(ctr_b,LOW);//AB
digitalWrite(ctr_c,HIGH);
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,LOW);//B
digitalWrite(ctr_c,HIGH);
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,LOW);
digitalWrite(ctr_c,LOW);//BC
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,LOW);//C
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,LOW);//CD
digitalWrite(ctr_d,LOW);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,HIGH);//D
digitalWrite(ctr_d,LOW);
delayMicroseconds(t);
digitalWrite(ctr_a,LOW);
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,HIGH);//DA
digitalWrite(ctr_d,LOW);
delayMicroseconds(t);
}
// digitalWrite(ctr_a,HIGH);
// digitalWrite(ctr_b,HIGH);
// digitalWrite(ctr_c,HIGH);
// digitalWrite(ctr_d,HIGH);
//
// for(i=1500;i>=1;i--)
// {
//
// digitalWrite(ctr_d,HIGH);//D
// delay(t);
// digitalWrite(ctr_c,HIGH);//DC
// delay(t);
// digitalWrite(ctr_d,LOW);//C
// delay(t);
// digitalWrite(ctr_b,HIGH);//CB
// delay(t);
// digitalWrite(ctr_c,LOW);//B
// delay(t);
// digitalWrite(ctr_a,HIGH);//BA
// delay(t);
// digitalWrite(ctr_b,LOW);//A
// delay(t);
// digitalWrite(ctr_d,HIGH);//AD
// delay(t);
// digitalWrite(ctr_a,LOW);
// digitalWrite(ctr_d,LOW);
// }
}- Adım 5
- Demo’yu yükleyin. Kodu nasıl yükleyeceğinizi bilmiyorsanız, lütfen buradaki Kodu yükleme nasıl yapılır kılavuzumuzu kontrol edin.
- Eğer her şey düzgün bir şekilde yüklendiyse, motor şöyle çalışmalıdır:

Özet
Arduino motorları – DC, Stepper, Servo Motor ile nasıl başlayacağınız hakkında her şey bu kadar! Arduino, motor çalıştırma konusunda her zaman popüler olmuştur ve bugün sadece 3 tanesini ele aldık! Arduino kullanarak DC, Servo veya stepper motoru nasıl çalıştıracağınız hakkında herhangi bir sorunuz varsa, lütfen aşağıdaki yorumlarda bırakmaktan çekinmeyin!
Aktüatörlerimiz ve motor ürünlerimizle ilgileniyor musunuz? Tüm motor ürünlerimizi buradan kontrol edebilirsiniz!