
T2000 GNSS modülüne giriş
SenseCAP T2000, IoT ve varlık izleme uygulamaları için tasarlanmış, kanıtlanmış ve yaygın olarak kullanılan çoklu takımyıldızı konumlandırma çözümü olan L76K GNSS modülü ile donatılmıştır.
L76K modülü, stabilitesi, güvenilirliği ve dengeli performansı ile bilinir, bu da onu uzun süreli dış mekan dağıtımı ve gerçek dünya konumlandırma senaryoları için uygun hale getirir.
Desteklenen Uydu Navigasyon Sistemleri
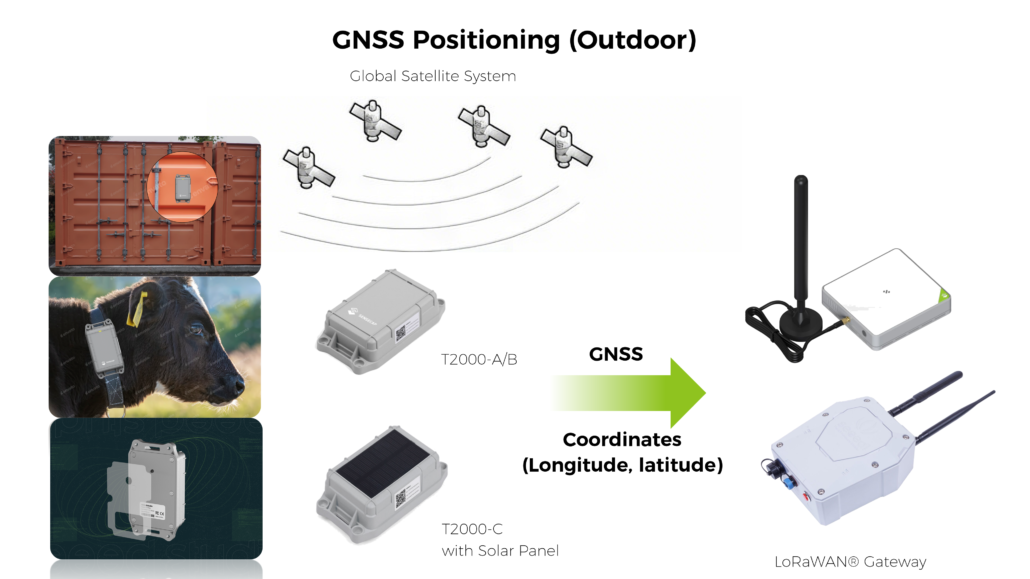
T2000’deki GNSS modülü, birden fazla küresel uydu navigasyon sistemini ve frekanslarını destekler:
- GPS L1 C/A (1575.42 MHz)
- QZSS L1 (1575.42 MHz)
- GLONASS L1 (1602.5625 MHz)
- BeiDou B1 (1561.098 MHz)
Birden fazla uydu takımyıldızını aynı anda kullanarak, T2000, özellikle kentsel alanlar, kısmi gökyüzü engeli veya karmaşık araziler gibi zorlu ortamlarda uydu erişimini ve konumlandırma dayanıklılığını önemli ölçüde artırabilir.
1. CEP50 Nedir?
GNSS konumlandırmasında, CEP50 (Dairesel Hata Olasılığı, %50), gerçek dünya konumlandırma doğruluğunu tanımlamak için yaygın olarak kullanılan bir metriktir.
CEP50, tüm bildirilen konum noktalarının %50’sinin düzeltilmiş konumdan ölçülen bir yarıçap içinde düştüğünü temsil eder.
Örneğin: Bir cihazın CEP50’si 2.5 metre ise, bu, konumlandırma sonuçlarının yarısından fazlasının gerçek konumun 2.5 metre içinde olduğunu gösterir.
2. T2000 CEP50 Test Sonuçları
(1)Test Kurulumu
Test, T2000’in GNSS konumlandırma doğruluğunu değerlendirmek için statik koşullar altında gerçekleştirilmiştir. Test parametreleri aşağıda listelenmiştir:
- GNSS tarama zaman aşımı: 60 saniye
- Uplink aralığı: 1 dakika
- Cihaz durumu: Sabit
- Cihaz başına örnek sayısı: Yaklaşık 1.000 konum kaydı
Aynı koşullar altında iki adet T2000 cihazı test edilmiştir.
(2)CEP50 Test Sonuçları
Toplanan GNSS konumlandırma verilerine dayanarak, her iki cihaz için istatistiksel hata analizi yapılmış ve aşağıdaki sonuçlar elde edilmiştir:
- Cihaz A
- CEP50: 7.1 m
- Maksimum kayma mesafesi: 71 m
- Cihaz B
- CEP50: 5.7 m
- Maksimum kayma mesafesi: 57.9 m
Sonuçlar, her iki T2000 cihazının test ortamında konum noktalarının nispeten yoğun bir dağılımını ürettiğini göstermektedir. Kaydedilen konumların yarısından fazlası yaklaşık 5–7 metre hata aralığında yer almakta olup, bu da stabil ve tutarlı GNSS konumlandırma performansını göstermektedir.
3. GNSS Konumlandırma Doğruluğunu Etkileyen Faktörler
GNSS konumlandırma doğruluğu birkaç faktörden etkilenir. Bunların bazıları GNSS sistemine ve atmosfer koşullarına özgüdür ve tamamen ortadan kaldırılamazken, diğerleri cihazın kurulumu ve kullanımı ile ilgilidir ve gerçek dünya dağıtımlarında optimize edilebilir.
(1)Engeller
Binalar, ağaçlar veya araçlar uydu sinyallerini engelleyebilir veya zayıflatabilir, bu da konumlandırma için mevcut uydu sayısını azaltır ve doğruluğu etkiler. Bu etkiyi en aza indirmek için cihaz, gökyüzünü net bir şekilde görebilen açık bir alana yerleştirilmelidir.
(2) Elektromanyetik Parazit
Yakındaki elektronik ekipmanlar veya büyük metal nesneler elektromanyetik parazit oluşturabilir, bu da GNSS sinyal alımını etkileyebilir. Cihazın güçlü elektronik kaynaklardan ve büyük metalik yapılardan mümkün olduğunca uzakta tutulması önerilir.
(3)Çok Yolda Yayılma Etkileri
GNSS sinyalleri, cihaza ulaşmadan önce binalar, duvarlar veya metal yüzeyler tarafından yansıtılabilir. Bu yansıtılan sinyaller, konumlandırma hatalarına neden olabilir ve bunlara genellikle çok yolda yayılma etkileri denir. Çok yolda yayılma parazitini azaltmak için cihaz, duvarlara veya çevredeki yapılara çok yakın yerleştirilmemelidir.
(4)Anten Yönelimi ve Yerleştirilmesi
GNSS anteninin performansı da konumlandırma doğruluğunda önemli bir rol oynamaktadır.
Cihaz, yukarıya bakacak şekilde yerleştirilmeli ve anten alanı optimal sinyal alımı sağlamak için kapatılmamalı veya engellenmemelidir.
Özet
Genel olarak, GNSS konumlandırma performansı çevredeki ortama büyük ölçüde bağlıdır. Küçük varyasyonlar ve konum kaymaları, GNSS sistemlerinin normal özellikleridir ve bireysel konum noktaları yerine CEP50 gibi istatistiksel metrikler kullanılarak değerlendirilmelidir.